ARM V2M Musca-S1¶
Overview¶
The v2m_musca_s1 board configuration is used by Zephyr applications that run on the V2M Musca-S1 board. It provides support for the Musca-S1 ARM Cortex-M33 CPU and the following devices:
Nested Vectored Interrupt Controller (NVIC)
System Tick System Clock (SYSTICK)
Cortex-M System Design Kit GPIO
Cortex-M System Design Kit UART
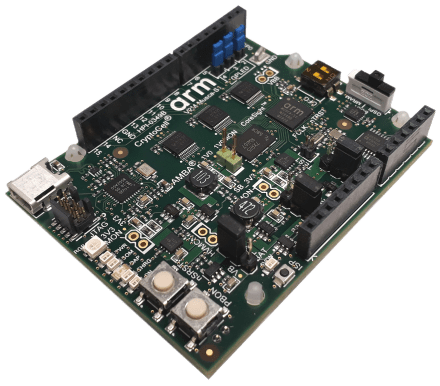
More information about the board can be found at the V2M Musca-S1 Website.
Hardware¶
ARM V2M MUSCA-S1 provides the following hardware components:
ARM Cortex-M33 (with FPU and DSP)
ARM IoT Subsystem for Cortex-M33
Memory
512KB on-chip system memory SRAM.
2MB on-chip eMRAM (non-volatile).
32MB of external QSPI flash.
Debug
JTAG, SWD & P-JTAG.
DAPLink with a virtual UART port.
Arduino interface
16 3V3 or 1V8 GPIO.
UART.
SPI.
I2C.
I2S.
3-channel PWM.
6-channel analog interface.
On-board Peripherals
User RGB LED.
Gyro sensor.
Combined ADC/DAC/temperature sensor.
User push buttons¶
The v2m_musca_s1 board provides the following user push buttons:
PBON: power on/off.
nSRST: Cortex-M33 system reset and CoreSight debug reset.
ISP: Updates DAPLink firmware.
Supported Features¶
The v2m_musca_s1 board configuration supports the following hardware features:
Interface |
Controller |
Driver/Component |
|---|---|---|
NVIC |
on-chip |
nested vector interrupt controller |
SYSTICK |
on-chip |
systick |
UART |
on-chip |
serial port-polling; serial port-interrupt |
PINMUX |
on-chip |
pinmux |
GPIO |
on-chip |
gpio |
TIMER |
on-chip |
timer |
TrustZone |
on-chip |
Trusted Firmware-M |
Other hardware features are not currently supported by the port. See the V2M Musca-S1 Website for a complete list of V2M Musca-S1 board hardware features.
The default configuration can be found in the defconfig file:
boards/arm/v2m_musca_s1/v2m_musca_s1_defconfig.
Interrupt Controller¶
Musca-S1 is a Cortex-M33 based SoC and has 15 fixed exceptions and 77 IRQs.
A Cortex-M33-based board uses vectored exceptions. This means each exception calls a handler directly from the vector table.
Zephyr provides handlers for exceptions 1-7, 11, 12, 14, and 15, as listed in the following table:
Exc# |
Name |
Remarks |
Used by Zephyr Kernel |
|---|---|---|---|
1 |
Reset |
system initialization |
|
2 |
NMI |
system fatal error |
|
3 |
Hard fault |
system fatal error |
|
4 |
MemManage |
MPU fault |
system fatal error |
5 |
Bus |
system fatal error |
|
6 |
Usage fault |
Undefined instruction, or switch attempt to ARM mode |
system fatal error |
7 |
SecureFault |
Unauthorized access to secure region from ns space |
system fatal error |
8 |
Reserved |
not handled |
|
9 |
Reserved |
not handled |
|
10 |
Reserved |
not handled |
|
11 |
SVC |
system calls, kernel run-time exceptions, and IRQ offloading |
|
12 |
Debug monitor |
system fatal error |
|
13 |
Reserved |
not handled |
|
14 |
PendSV |
context switch |
|
15 |
SYSTICK |
system clock |
|
16 |
Reserved |
not handled |
|
17 |
Reserved |
not handled |
|
18 |
Reserved |
not handled |
Pin Mapping¶
The ARM V2M Musca-S1 board’s GPIO controller is responsible for pin-muxing, input/output, pull-up, etc. All GPIO controller pins are exposed via pins 0 - 15.
Mapping from the ARM V2M Musca-S1 Board pins to GPIO controller pins:
D0 : P0_0
D1 : P0_1
D2 : P0_2
D3 : P0_3
D4 : P0_4
D5 : P0_5
D6 : P0_6
D7 : P0_7
D8 : P0_8
D9 : P0_9
D10 : P0_10
D11 : P0_11
D12 : P0_12
D13 : P0_13
D14 : P0_14
D15 : P0_15
Peripheral Mapping:
UART_0_RX : D0
UART_0_TX : D1
SPI_0_CS : D10
SPI_0_MOSI : D11
SPI_0_MISO : D12
SPI_0_SCLK : D13
I2C_0_SDA : D14
I2C_0_SCL : D15
For mode details please refer to Musca-S1 Technical Reference Manual (TRM).
RGB LED¶
Musca-S1 has a built-in RGB LED connected to GPIO[4:2] pins.
Red LED connected at GPIO[2] pin,with optional PWM0.
Green LED connected at GPIO[3] pin,with optional PWM1.
Blue LED connected at GPIO[4] pin,with optional PWM2.
Note
The SCC registers select the functions of pins GPIO[4:2].
System Clock¶
V2M Musca-S1 has a 32.768kHz crystal clock. The clock goes to a PLL and is multiplied to drive the Cortex-M33 processors and SSE-200 subsystem. The default is 50MHz but can be increased to 200MHz maximum for the secondary processor (CPU1) via software configuration. The maximum clock frequency for the primary processor (CPU0) is 50MHz.
Serial Port¶
The ARM Musca-S1 processor has two UARTs. Both the UARTs have only two wires for RX/TX and no flow control (CTS/RTS) or FIFO. The Zephyr console output, by default, uses UART1.
Security components¶
Implementation Defined Attribution Unit (IDAU). The IDAU is used to define secure and non-secure memory maps. By default, all of the memory space is defined to be secure accessible only.
Secure and Non-secure peripherals via the Peripheral Protection Controller (PPC). Peripherals can be assigned as secure or non-secure accessible.
Secure boot.
Secure AMBA® interconnect.
Serial Configuration Controller (SCC)¶
The ARM Musca-S1 test chip implements a Serial Configuration Control (SCC) register. The purpose of this register is to allow individual control of clocks, reset-signals and interrupts to peripherals, and pin-muxing.
Boot memory¶
Normal Musca-S1 test chip boot operation is from 2MB eMRAM by default, and it offers the fastest boot method. Musca-S1 test chip also support to boot from 32MB off-chip QSPI flash. You can update the DAPLink firmware and set the boot selector slider switch for either QSPI or eMRAM for booting.
Programming and Debugging¶
Musca-S1 supports the v8m security extension, and by default boots to the secure state.
When building a secure/non-secure application, the secure application will have to set the IDAU/SAU and MPC configuration to permit access from the non-secure application before jumping.
The following system components are required to be properly configured during the secure firmware:
AHB5 TrustZone Memory Protection Controller (MPC).
AHB5 TrustZone Peripheral Protection Controller (PPC).
Implementation-Defined Attribution Unit (IDAU).
For more details please refer to Corelink SSE-200 Subsystem.
Flashing¶
DAPLink¶
V2M Musca-S1 provides:
A USB connection to the host computer, which exposes a Mass Storage and an USB Serial Port.
A Serial Flash device, which implements the USB flash disk file storage.
A physical UART connection which is relayed over interface USB Serial port.
This interfaces are exposed via DAPLink which provides:
Serial Wire Debug (SWD).
USB Mass Storage Device (USBMSD).
UART.
Remote reset.
For more details please refer to the DAPLink Website.
Building a secure only application¶
You can build applications in the usual way. Here is an example for the Hello World application.
# From the root of the zephyr repository
west build -b v2m_musca_s1 samples/hello_world
Open a serial terminal (minicom, putty, etc.) with the following settings:
Speed: 115200
Data: 8 bits
Parity: None
Stop bits: 1
Uploading an application to V2M Musca-S1¶
To upload the Hello World application to the board, no extra steps are
required. You can directly upload build/zephyr/zephyr.hex, which is
generated by Zephyr’s build system.
In other situations, applications must first be converted to Intel’s hex format before being flashed to a V2M Musca-S1. An optional bootloader can also be prepended to the image.
The eMRAM base address alias is 0xA000000, and the QSPI flash base address
alias is 0x0. The image offset is calculated by adding the flash offset to the
bootloader partition size (when there is one).
A third-party tool (srecord) can be used to concatenate the images and generate the Intel formatted hex image.
For more information refer to the Srecord Manual.
srec_cat $BIN_BOOLOADER -Binary -offset $FLASH_OFFSET $BIN_APP -Binary -offset $IMAGE_OFFSET -o zephyr.hex -Intel
# For a 128K bootloader IMAGE_OFFSET = $FLASH_OFFSET + 0x20000
srec_cat $BIN_BOOLOADER -Binary -offset 0xA000000 $BIN_APP -Binary -offset 0xA020000 -o zephyr.hex -Intel
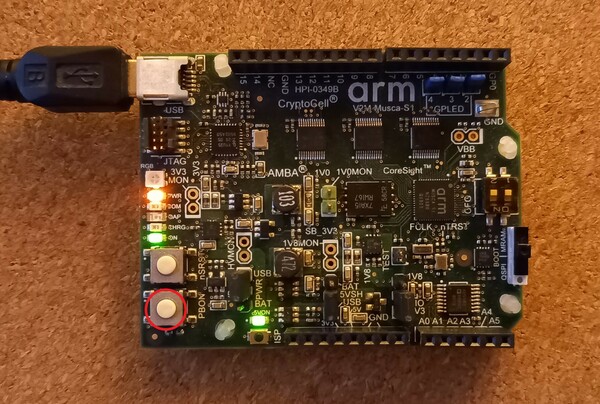
To upload the application, connect the V2M Musca-S1 to your host computer using
the USB port and power-on the board by pressing the PBON button as seen on the
picture above. The 3 LEDs should be lit (PWR, ON and 5VON) and you should see a
USB connection exposing a Mass Storage (MUSCA_S) and a USB Serial Port.
Now copy the generated zephyr.hex to the MUSCA_S drive.
Reset the board, and if you were building the hello_world application you should see the following message on the corresponding serial port:
Musca-S1 Dual Firmware Version 1.9
*** Booting Zephyr OS build zephyr-v2.4.0-2314-gadc81d188323 ***
Hello World! musca_s1
Building a secure/non-secure image with Trusted Firmware-M¶
The process requires five steps:
Build Trusted Firmware-M (TF-M).
Import it as a library to the Zephyr source folder.
Build Zephyr with a non-secure configuration.
Merge the two binaries together and sign them.
Concatenate the bootloader with the signed image blob.
In order to build tfm please refer to Trusted Firmware-M Guide.
Follow the build steps for AN521 target while replacing the platform with
-DTFM_PLATFORM=musca_s1 and compiler (if required) with
-DTFM_TOOLCHAIN_FILE=toolchain_GNUARM.cmake.
Copy over TF-M as a library to the Zephyr project source and create a shortcut for the secure veneers and necessary header files. All files are in the install folder after TF-M built.
Building the TF-M integration sample for Musca-S1¶
The TF-M integration samples can be run using the v2m_musca_s1_ns
target. Please make sure all the requirements listed in the sample’s
description are met before building.
# From the root of the zephyr repository
west build -b v2m_musca_s1_ns samples/tfm_integration/psa_crypto
To upload the build artifact to the board, first connect the Musca-S1 to your
computer using the USB port, press the PBON button, and copy
the build/tfm_zephyr.hex file onto the MUSCA_S mass storage device.
(For a more detailed description of these steps, please read the ‘Uploading
an application to V2M Musca-S1’ section.)
Once the file transfer has completed, you may reset the board.
The tfm_zephyr.hex file was generated by concatenating the signed TF-M and
Zephyr binaries with the MCUboot image, and converting it to Intel’s hex format.
These steps are all performed automatically by CMake.
For alternative build options and more information, please read the corresponding TF-M integration example’s README file.