ST Nucleo F410RB¶
Overview¶
The Nucleo F410RB board features an ARM Cortex-M4 based STM32F410RB MCU with a wide range of connectivity support and configurations. Here are some highlights of the Nucleo F410RB board:
STM32 microcontroller in QFP64 package
Two types of extension resources:
Arduino Uno V3 connectivity
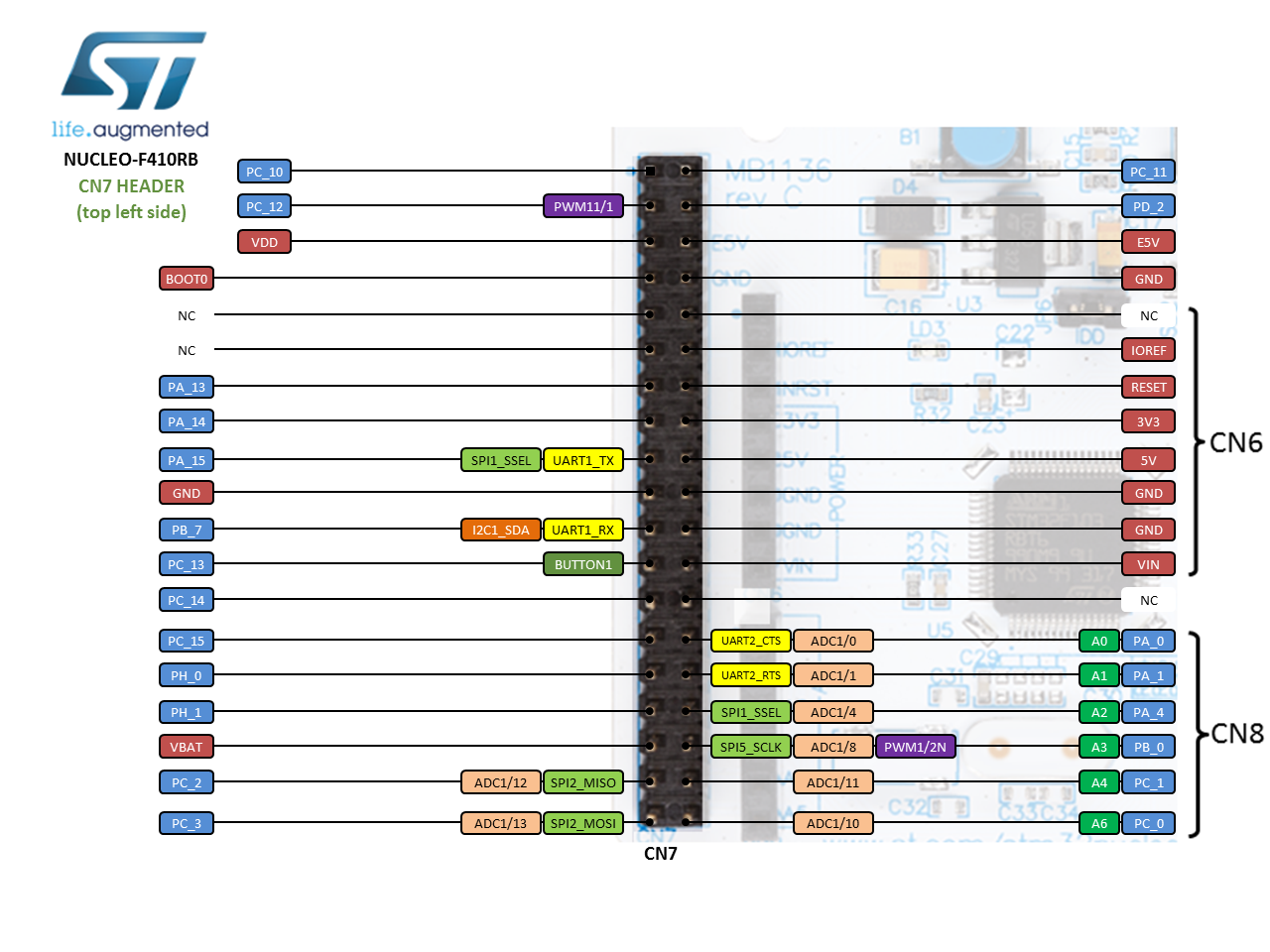
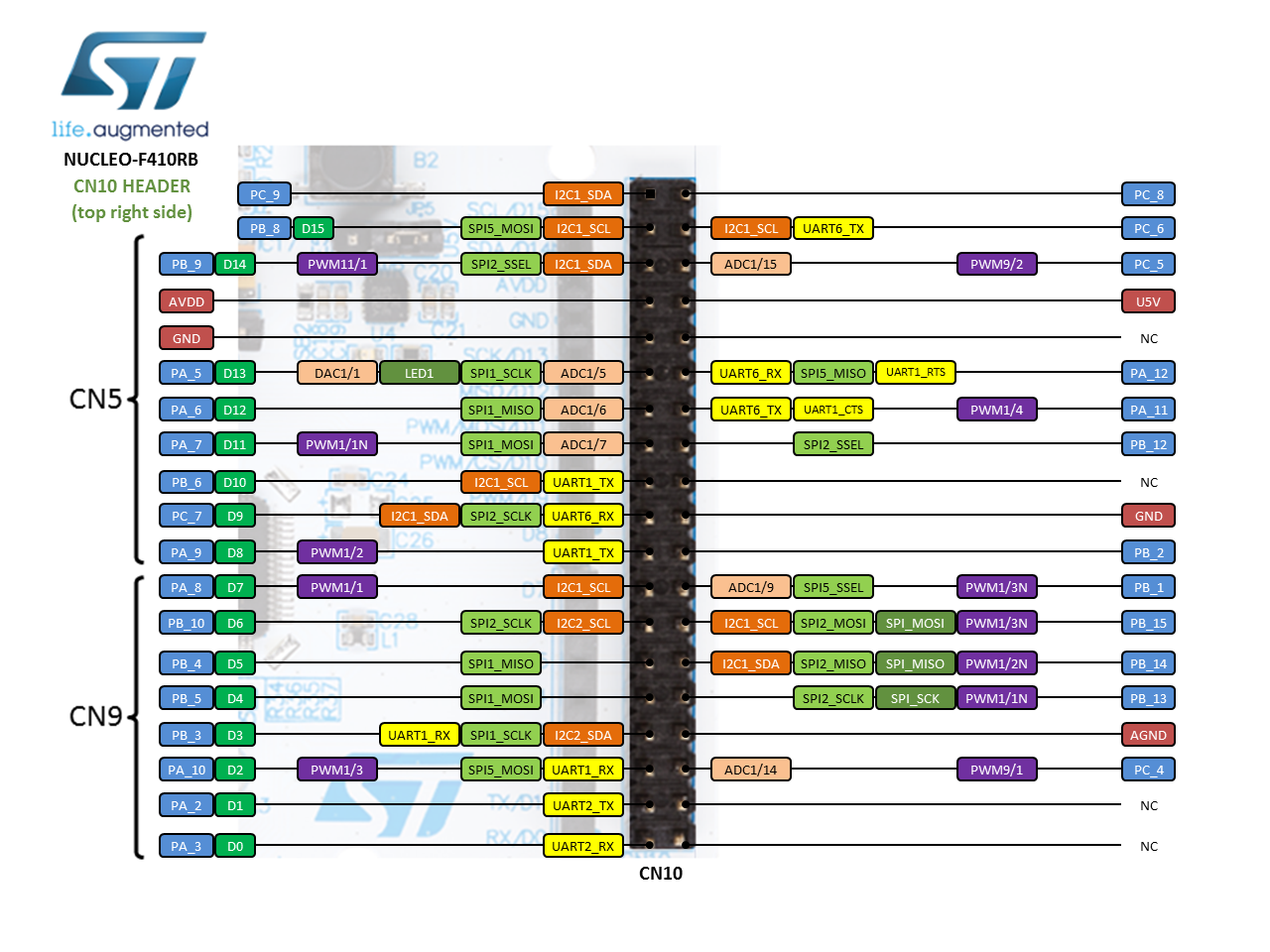
ST morpho extension pin headers for full access to all STM32 I/Os
On-board ST-LINK/V2-1 debugger/programmer with SWD connector
Flexible board power supply:
USB VBUS or external source(3.3V, 5V, 7 - 12V)
Power management access point
Three LEDs: USB communication (LD1), user LED (LD2), power LED (LD3)
Two push-buttons: USER and RESET
More information about the board can be found at the Nucleo F410RB website.
Hardware¶
Nucleo F410RB provides the following hardware components:
STM32F410RBT6 in LQFP64 package
ARM® 32-bit Cortex®-M4 CPU with FPU
Adaptive real-time accelerator (ART Accelerator)
100 MHz max CPU frequency
VDD from 1.7 V to 3.6 V
128 KB Flash
32 KB SRAM
General purpose timer (4)
Low-power timer (1)
Advanced-control timer (1)
Random number generator (TRNG for HW entropy)
SPI/I2S (3)
I2C (3)
USART (3)
GPIO (50) with external interrupt capability
12-bit ADC with 16 channels
12-bit DAC with 1 channel
RTC
More information about STM32F410RB can be found here:
Supported Features¶
The Zephyr nucleo_f410rb board configuration supports the following hardware features:
Interface |
Controller |
Driver/Component |
|---|---|---|
NVIC |
on-chip |
nested vector interrupt controller |
UART |
on-chip |
serial port |
PINMUX |
on-chip |
pinmux |
GPIO |
on-chip |
gpio |
PWM |
on-chip |
pwm |
I2C |
on-chip |
i2c |
I2S |
on-chip |
i2s |
SPI |
on-chip |
spi |
ADC |
on-chip |
ADC Controller |
DAC |
on-chip |
DAC Controller |
WATCHDOG |
on-chip |
window & independent |
Other hardware features are not yet supported on this Zephyr port.
The default configuration can be found in the defconfig file:
boards/arm/nucleo_f410rb/nucleo_f410rb_defconfig
Connections and IOs¶
Nucleo F410RB Board has 8 GPIO controllers. These controllers are responsible for pin muxing, input/output, pull-up, etc.

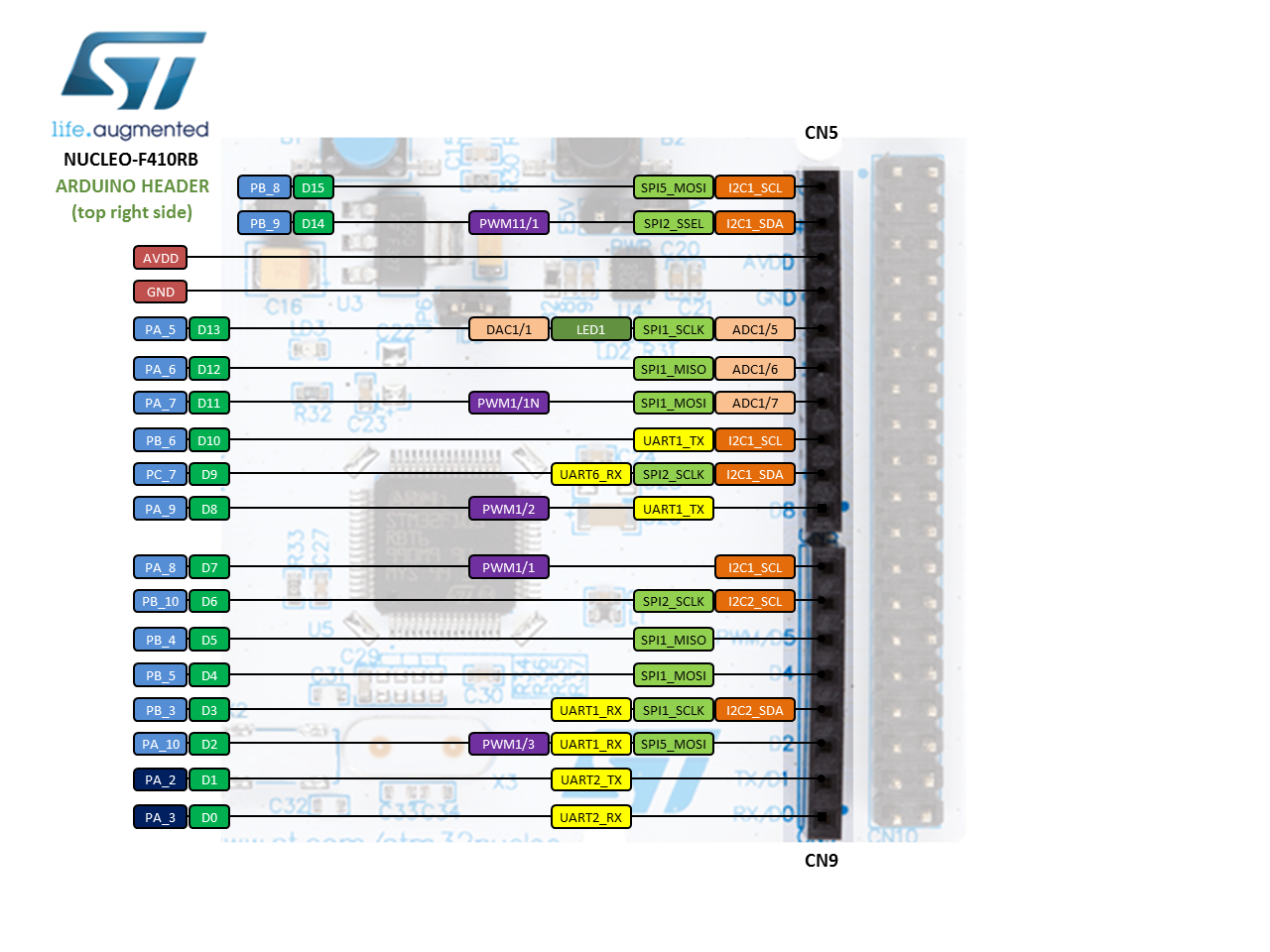
Default Zephyr Peripheral Mapping:¶
UART_1_TX : PB6
UART_1_RX : PB7
UART_2_TX : PA2
UART_2_RX : PA3
USER_PB : PC13
LD2 : PA5
I2C1_SDA : PB9
I2C1_SCL : PB8
I2C2_SDA : PB3
I2C2_SCL : PB10
System Clock¶
Nucleo F410RB System Clock could be driven by an internal or external oscillator, as well as the main PLL clock. By default, the System clock is driven by the PLL clock at 84MHz, driven by an 8MHz high-speed external clock.
Serial Port¶
Nucleo F410RB board has 3 USARTs. The Zephyr console output is assigned to UART2. Default settings are 115200 8N1.
Programming and Debugging¶
Applications for the nucleo_f410rb board configuration can be built and
flashed in the usual way (see Building an Application and
Run an Application for more details).
Flashing¶
Nucleo F410RB board includes an ST-LINK/V2-1 embedded debug tool interface. This interface is supported by the openocd version included in the Zephyr SDK.
Flashing an application to Nucleo F410RB¶
Here is an example for the Hello World application.
Run a serial host program to connect with your Nucleo board.
$ minicom -b 115200 -D /dev/ttyACM0
Build and flash the application:
# From the root of the zephyr repository
west build -b nucleo_f410rb samples/hello_world
west flash
You should see the following message on the console:
$ Hello World! arm
Debugging¶
You can debug an application in the usual way. Here is an example for the Hello World application.
# From the root of the zephyr repository
west build -b nucleo_f410rb samples/hello_world
west debug