RAK5010¶
Overview¶
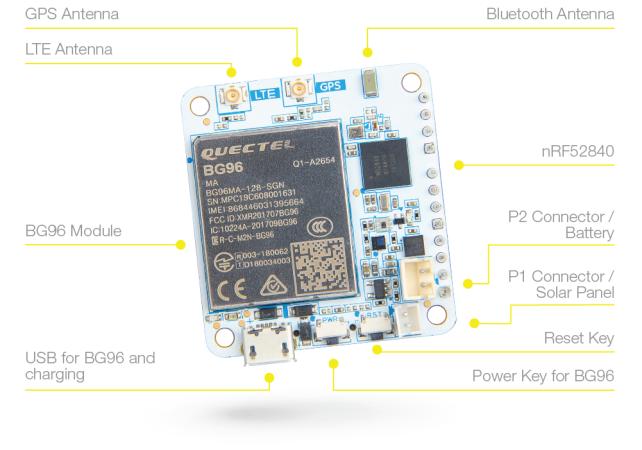
WisTrio NB-IoT Tracker Pro (RAK5010) is a tracker with integrated LTE CAT M1 & NB1, GPS, BLE, and sensors. It is built on the Quectel BG96 LTE CAT M1 & NB1 module, which has an integrated GPS receiver. The MCU running the board is a Nordic nRF52840 controller.
As it has both GPS and BLE it can be used for outdoor and indoor scenarios, where location-based services need be present.
The built-in sensors for RAK5010 are temperature and humidity sensor, motion sensor, pressure sensor, and light sensor. The extension IOs allow adding more sensors in addition to the on-board ones.
This board is particularly suitable to be used as a quick testing and prototyping tool for applications requiring NB-IoT connectivity. Application development supports the GCC environment.
Hardware¶
nRF52840 ARM Cortex-M4F Processor
32.768 kHz crystal oscillator
1 Micro-AB USB OTG host/device
Quectel BG96, with LTE CAT M1, LTE NB1, and GNSS
iPEX connectors for the LTE and GPS antenna and an on-board ceramic antenna for the BLE.
nano-SIM and ESIM options.
Multiple interfaces, I2C, UART, GPIO, ADC
1 user LED
1 SHTC3 Humidity and Temperature Sensor
1 OPT3001DNPR Ambient Light Sensor
1 LPS22HB Pressure Sensor
1 LIS3DH Motion Sensor
Powered by either Micro USB, 3.7V rechargeable battery or a 5V Solar Panel Port
Supported Features¶
The rak5010_nrf52840 board configuration supports the following hardware features:
Interface |
Controller |
Driver/Component |
|---|---|---|
ADC |
on-chip |
adc |
CLOCK |
on-chip |
clock_control |
FLASH |
on-chip |
flash |
GPIO |
on-chip |
gpio |
I2C(M) |
on-chip |
i2c |
MPU |
on-chip |
arch/arm |
NVIC |
on-chip |
arch/arm |
PWM |
on-chip |
pwm |
RADIO |
on-chip |
Bluetooth, ieee802154 |
RTC |
on-chip |
system clock |
SPI(M/S) |
on-chip |
spi |
UART |
on-chip |
serial |
USB |
on-chip |
usb |
WDT |
on-chip |
watchdog |
Other hardware features are not supported by the Zephyr kernel.
Programming and Debugging¶
The RAK5010 board shall be connected to a Segger Embedded Debugger Unit J-Link OB. This provides a debug interface to the NRF52840 chip. You can use JLink to communicate with the NRF52840.
Flashing¶
Download JLink from the Segger JLink Downloads Page 1. Go to the section “J-Link Software and Documentation Pack” and install the “J-Link Software and Documentation pack for Linux”. The application JLinkExe needs to be accessible from your path.
Run your favorite terminal program to listen for output. Under Linux the terminal should be
/dev/ttyACM0. For example:$ minicom -D /dev/ttyACM0 -oThe -o option tells minicom not to send the modem initialization string. Connection should be configured as follows:
Speed: 115200
Data: 8 bits
Parity: None
Stop bits: 1
#. Connect the RAK5010 board to your host computer using the USB debug port. Then build and flash the Hello World application.
# From the root of the zephyr repository west build -b rak5010_nrf52840 samples/hello_world west flashYou should see “Hello World! rak5010_nrf52840” in your terminal.
Debugging¶
You can debug an application in the usual way. Here is an example for the Hello World application.
# From the root of the zephyr repository
west build -b rak5010_nrf52840 samples/hello_world
west debug