Laird Connectivity BL654 Sensor Board¶
Overview¶
The BL654 Sensor Board hardware provides support for the Laird Connectivity BL654 module which is powered by a Nordic Semiconductor nRF52840 ARM Cortex-M4F CPU.
This sensor board has the following features:
ADC
CLOCK
FLASH
GPIO
I2C
MPU
NVIC
PWM
RADIO (Bluetooth Low Energy and 802.15.4)
RTC
Segger RTT (RTT Console)
SPI
UART
WDT
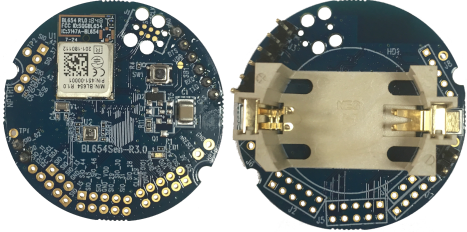
BL654 Sensor Board front and back¶

BL654 Sensor Board connected to USB-SWD Programmer (UART and SWD access)¶
More information about the BL654 module can be found on the BL654 website 2, more information about the USB-SWD Programmer can be found on the USB-SWD Programmer website 4.
Hardware¶
Supported Features¶
The BL654 Sensor Board configuration supports the following hardware features:
Interface |
Controller |
Driver/Component |
|---|---|---|
ADC |
on-chip |
adc |
CLOCK |
on-chip |
clock_control |
FLASH |
on-chip |
flash |
GPIO |
on-chip |
gpio |
I2C(M) |
on-chip |
i2c |
MPU |
on-chip |
arch/arm |
NVIC |
on-chip |
arch/arm |
PWM |
on-chip |
pwm |
RADIO |
on-chip |
Bluetooth, ieee802154 |
RTC |
on-chip |
system clock |
RTT |
Segger |
console |
SPI(M/S) |
on-chip |
spi |
UART |
on-chip |
serial |
WDT |
on-chip |
watchdog |
Other hardware features are not supported by the Zephyr kernel. See the BL654 website 2 for a complete list of BL654 module hardware features.
Connections and IOs¶
LED¶
LED1 (blue) = P0.16 (active low)
Push button¶
BUTTON1 (SW1) = P1.03 (active high)
Sensor¶
The BL654 Sensor Board has an on-board Bosch BME280 temperature/humidity/pressure sensor which is connected to the BL654 via I2C.
SCL = P0.27
SDA = P0.26
More information about the Bosch BME280 sensor can be found on the Bosch BME280 sensor website 1.
Powering the sensor¶
The sensor can be powered directly from a coin cell or from a voltage supplied on the UART pins, the board accepts voltage from 1.8v-3.3v. Note that if using a battery with a UART/debugger connected, the voltage of the UART/debugger (if it does not automatically sense/adjust) must be within 0.3v of the voltage of the coin cell to prevent supression diodes in the nRF52840 silicon being activated or possible back-powering of the battery.
To power the board from an external source via UART, the solder bridge SB1 must be blobbed.
Programming and Debugging¶
Applications for the bl654_sensor_board board configuration can be built,
flashed, and debugged in the usual way. See Building an Application and
Run an Application for more details on building and running. An external
debugger/programmer is required which can be connected to using a Tag-Connect
TC2030-CTX cable, a Laird Connectivity USB-SWD Programmer board or Segger JLink
programmer can be used to program and debug the BL654 sensor board.
Flashing¶
If using an external JLink, follow the instructions in the Nordic nRF5x Segger J-Link page to install and configure all the necessary software. Further information can be found in Flashing. Then build and flash applications as usual (see Building an Application and Run an Application for more details). If using a Laird Connectivity USB-SWD Programmer Board, see the pyOCD website 3 to find details about the software and how to install it.
Here is an example for the Hello World application.
First, run your favorite terminal program to listen for output - note that an external UART is required to be connected to the BL654 sensor board’s UART, if using the Laird Connectivity USB-SWD Programmer Board, the BL654 sensor board can be plugged in to the UART header. An FTDI cable can also be used - the voltage of the I/O lines and power line must be between 1.8v and 3.3v, do not connect an FTDI cable with a 5v power line to the BL654 sensor board.
J3 UART connector pinout (all pins referenced to operating voltage Vdd):
Pin No. |
Name |
Description |
Direction |
|---|---|---|---|
1 |
GND |
GND |
(N/A) |
2 |
RTS |
UART Ready-to-send pin |
OUT |
3 |
VDD |
Supply voltage (requires SB1 to be blobbed) |
(N/A) |
4 |
RXD |
UART Receive pin |
IN |
5 |
TXD |
UART Transmit pin |
(N/A) |
6 |
CTS |
UART Clear-to-send pin |
IN |
$ minicom -D <tty_device> -b 115200
Replace <tty_device> with the port where the BL654 sensor board
can be found. For example, under Linux, /dev/ttyACM0.
The BL654 sensor board needs an external programmer to program it, any SWD programmer which has a 9-pin ARM debug port can be used with a Tag-Connect TC2030-CTX cable. If using the Laird Connectivity USB-SWD Programmer Board, connect the cable to P1 and ensure the board is set to supply power to the target at 3.3v.
J1 Tag-Connect SWD Pinout:
Pin No. |
Name |
Description |
Direction |
|---|---|---|---|
1 |
VDD |
Operating voltage |
(N/A) |
2 |
SWDIO |
Serial wire data input/output pin |
IN/OUT |
3 |
nRESET |
Module reset pin |
IN |
4 |
SWCLK |
Serial wire clock input pin |
IN |
5 |
GND |
GND |
(N/A) |
6 |
SWO |
Serial wire output pin |
OUT |
Then build and flash the application in the usual way.
# From the root of the zephyr repository
west build -b bl654_sensor_board samples/hello_world
west flash
Debugging¶
Refer to the Nordic nRF5x Segger J-Link page to learn about debugging Nordic based boards if using an external JLink debugger. If using a Laird Connectivity USB-SWD Programmer Board, pyOCD can be used for debugging.
Testing Bluetooth on the BL654 Sensor Board¶
Many of the Bluetooth examples will work on the BL654 Sensor Board. Try them out:
Testing the LED and button on the BL654 Sensor Board¶
There are 2 samples that allow you to test that the button (switch) and LED on the board are working properly with Zephyr:
You can build and flash the examples to make sure Zephyr is running correctly on your board. The button and LED definitions can be found in boards/arm/bl654_sensor_board/bl654_sensor_board.dts.