MEC1501 Modular card ASSY6885¶
Overview¶
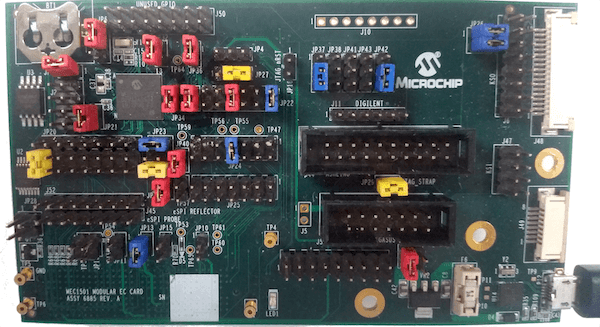
The MEC1501 Modular card ASSY6885 is a development board to evaluate the Microchip MEC152X series microcontrollers. This board can work standalone or be mated with any platform that complies with MECC specification.
Hardware¶
MEC1521HA0SZ ARM Cortex-M4 Processor
256 KB RAM and 64 KB boot ROM
GPIO headers
UART1 using microUSB
PECI interface 3.0
10 SMBUS instances
FAN, PMW and TACHO pins
VCI interface
Independent Hardware Driven PS/2 Ports
At difference from MEC15xx evaluation board, modular MEC1521 exposes the pins in 2 different ways:
Standalone mode via headers
GPIOs
PWM5
JTAG/SWD, ETM and MCHP Trace ports
eSPI bus
SMB0
Mated mode with another platform that has a high density MECC connector.
FAN0, PWM0, SMB0, SMB1, SMB4 and SMB5
eSPI bus
Breathing/Blinking LEDs
The board is powered through the +5V USB Micro A connector or from the MECC connector.
For more information about the SOC please see the MEC152x Reference Manual 1
Supported Features¶
The mec1501modular_assy6885 board configuration supports the following hardware features:
Interface |
Controller |
Driver/Component |
|---|---|---|
NVIC |
on-chip |
nested vector interrupt controller |
SYSTICK |
on-chip |
systick |
UART |
on-chip |
serial port |
GPIO |
on-chip |
gpio |
ESPI |
on-chip |
espi |
I2C |
on-chip |
i2c |
PINMUX |
on-chip |
pinmux |
RTOS |
on-chip |
timer |
TIMER |
on-chip |
counter |
PWM |
on-chip |
pwm |
ADC |
on-chip |
adc |
WATCHDOG |
on-chip |
watchdog |
PS2 |
on-chip |
ps2 |
Other hardware features are not currently supported by Zephyr (at the moment)
The default configuration can be found in the boards/arm/mec1501modular_assy6885/mec1501modular_assy6885_defconfig Kconfig file.
Connections and IOs¶
This evaluation board kit is comprised of the following HW blocks:
MEC1501 Modular Card ASSY 6885 Rev A0 MEC1501 Modular EC Card - Assy_6885 Rev A0p1 2
System Clock¶
The MEC1501 MCU is configured to use the 48Mhz internal oscillator with the on-chip PLL to generate a resulting EC clock rate of 12 MHz. See Processor clock control register in chapter 4 “4.0 POWER, CLOCKS, and RESETS” of the data sheet in the references at the end of this document.
Serial Port¶
UART1 is configured for serial logs.
Jumper settings¶
Please follow the jumper settings below to properly demo this board. Advanced users may deviate from this recommendation.
Jumper setting for MEC1501 Modular Assy 6885 Rev A1p0¶
Boot-ROM Straps¶
These jumpers configure MEC1501 Boot-ROM straps.
JP37 (CMP_STRAP) |
J6 (CR_STRAP) |
JP41 (VTR2_STRAP) |
JP23 (BSS_STRAP) |
|---|---|---|---|
1-2 |
1-2 |
1-2 |
3-4 |
JP23 3-4 pulls SHD SPI CS0# up to VTR2. MEC1501 Boot-ROM samples
SHD SPI CS0# and if high, it loads code from SHD SPI.
This is the recommended setup.
CR_STRAP |
BSS_STRAP |
SOURCE |
0 |
X |
Use 3.3V Private SPI |
1 |
0 |
Use eSPI Flash channel |
1 |
Use 3.3V Shared channel(R) |
Power management¶
JP20 2-3 is required so all GPIOs powered by VTR3 rail worked at 1.8V.
Note
External 1.8V needs to be connected to JP13.1
JP20 (VTR3 selection) |
JP13 (1.8V source) |
|---|---|
2-3 |
1.8V to pin 1 |
Jumper location map¶
+--------------------------------------------------------------------------------------+
| |------------| +----------+ J10 || |
| [BT1] + +------------+ J50 ++ ++ || |
| | JP38 JP43 ++ || || |
| + + + +-+ JP4 + + JP26 || || |
| JP6 + + + + + + + + || || |
| JP31 ++ JP32 JP36 +-+ JP27 + + + + J6 || |
| JP18 JP37 JP41 JP42 ++ |
| ++ + + +--------+ J48 |
| || JP21 + + +--------+ JP22 +----------+ |
| J2 || + JP34 JP30 J11 ++ |
| ++ + J44 || |
| ++ +----------------+ || |
| +---------------+ || + JP24 |----------------| ++ |
| |---------------| ++ + +----------+ +----------------+ J47 |
| JP20 +---------------+ JP23 JP40 +----------+ ++ |
| + ++ JP29 || |
| + + +----------+ + || |
| J52+---------------+ + + +----------+ J5 +-------------+ ++ |
| J45+---------------+ JP33 TP57 JP25 +-------------+ J4 J49 |
| |
| ++ TP4 +----------+ ++ |
| ++ + + + + + + TP61 +----------+ ++ |
| JP28 + + + + + TP65 + TP60 J51 JP35 |
| TP58 JP16 JP11 JP13 JP15 JP10 |
| TP5 |
| TP6 TP1 |
+--------------------------------------------------------------------------------------+
Programming and Debugging¶
Setup¶
Clone the MEC152x SPI Image Gen 3 repository or download the files within that directory. For the pre-production MEC150x use the MEC150x SPI Image Gen 4 repository.
Make the image generation available for Zephyr, by making the tool searchable by path, or by setting an environment variable
EVERGLADES_SPI_GEN, for example:export EVERGLADES_SPI_GEN=<path to tool>/everglades_spi_gen_RomENote that the tools for Linux and Windows have different file names. For the pre-production MEC1501 SOC use everglades_spi_gen_lin64.
If needed, a custom SPI image configuration file can be specified to override the default one.
export EVERGLADES_SPI_CFG=custom_spi_cfg.txt
Building¶
Build Hello World application as you would normally do.
Once you have
zephyr.bin, use the MEC152x SPI Image Gen 3 microchip tool to create the final binary. You need the output from this tool to flash in the SHD SPI memory.
Flashing¶
Connect Dediprog into header
J2.Flash the SPI NOR
U3at offset 0x0 using Dediprog SF100 or a similar tool for flashing SPI chips.Run your favorite terminal program to listen for output. Under Linux the terminal should be
/dev/ttyACM0. For example:$ minicom -D /dev/ttyACM0 -oThe -o option tells minicom not to send the modem initialization string. Connection should be configured as follows:
Speed: 115200
Data: 8 bits
Parity: None
Stop bits: 1
Connect the MEC1501MODULAR_ASSY6885 board to your host computer using the UART1 port and apply power.
You should see
"Hello World! mec1501modular_assy6885"in your terminal.
Debugging¶
This board comes with a Cortex ETM port which facilitates tracing and debugging using a single physical connection. In addition, it comes with sockets for JTAG only sessions.
HW Issues¶
In case you don’t see your application running, please make sure LED1 is lit.
If is off, then check the power related jumpers again.